

The Accessibility Signature Test | A Strong-Null Interferometric Protocol for Constraint-Based Realization
Abstract
Quantum measurement theories that propose an additional outcome-realization law must identify an observable condition under which they can fail. This paper formulates such a condition for Constraint-Based Realization by proposing a registered, blinded, nuisance-bounded interferometric test of operational record accessibility. Record accessibility is defined as normalized accessible which-path mutual information, η = I_acc(W;R) / H(W).
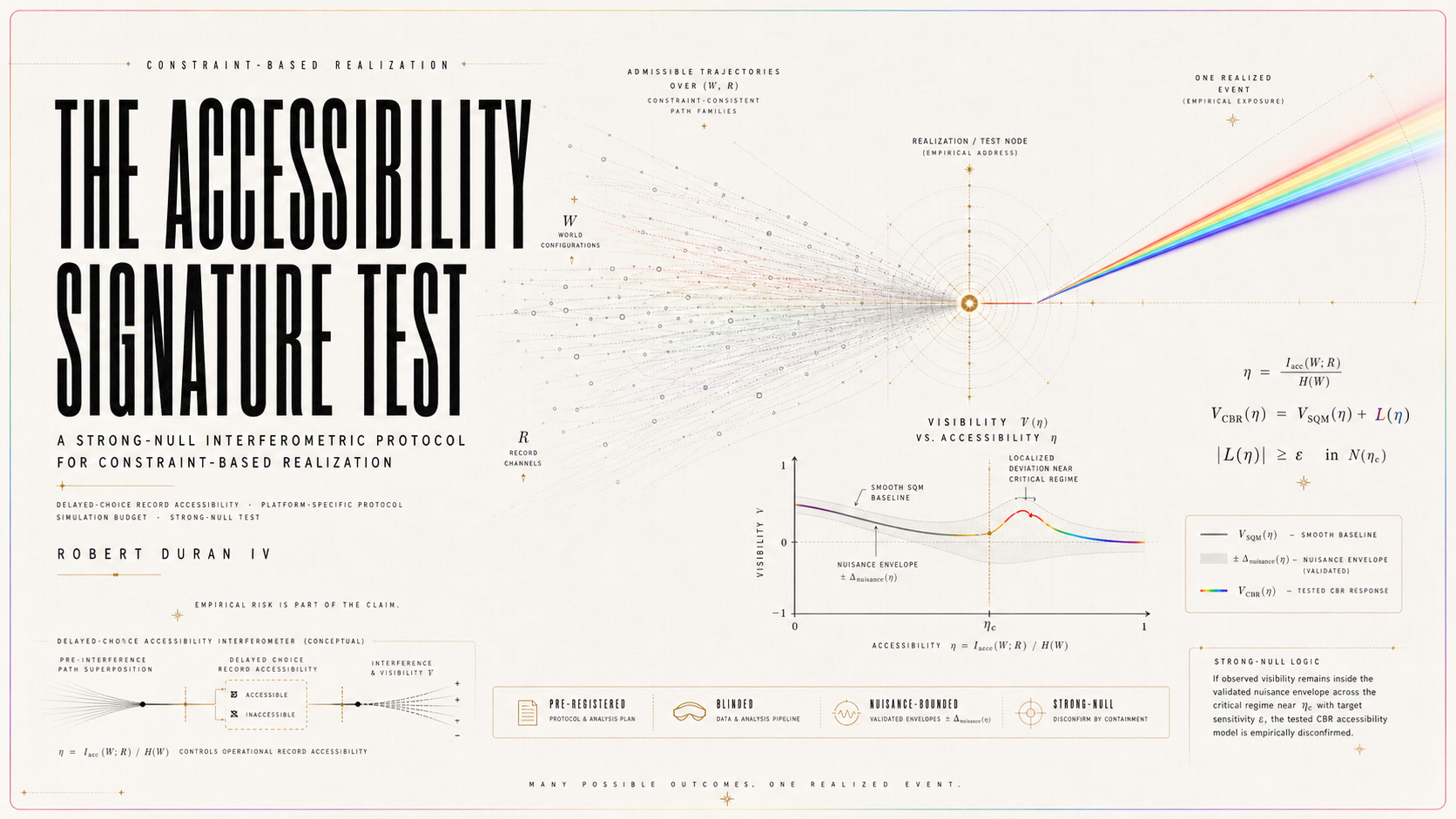
Standard quantum/decoherence modeling supplies a pre-registered smooth visibility baseline V_SQM(η) ± Δ_nuisance(η). The tested CBR accessibility model adds a localized realization term, V_CBR(η) = V_SQM(η) + L(η), where |L(η)| ≥ ε for at least one η inside N(η_c) = [η_c − δ, η_c + δ]. The experiment asks whether observed visibility V_obs(η) remains inside the standard nuisance envelope or exhibits a localized, artifact-resistant deviation near η_c.
The paper specifies η calibration, baseline construction, simulation and power requirements, statistical decision rules, model-selection penalties, validity gates, audit controls, and rival-explanation rejection criteria. A reproducible pre-registered deviation near η_c would motivate a CBR-type accessibility term beyond smooth decoherence modeling; a smooth null with sensitivity sufficient to detect ε would disconfirm the tested CBR accessibility model. The aim is not to prove CBR, but to make one precise accessibility-signature hypothesis empirically vulnerable.
1. Introduction
1.1 The measurement problem as a selection-law problem
The measurement problem can be framed as a problem of physical selection. Standard quantum mechanics supplies a probability rule for possible outcomes, while decoherence explains why interference between alternatives becomes practically inaccessible when systems become entangled with uncontrolled degrees of freedom. These tools are indispensable, but they do not by themselves state a physical selection law identifying why one outcome, rather than another, becomes the realized event in a single measurement.
Constraint-Based Realization, or CBR, addresses this issue by treating realization as a constraint-governed transition. The minimal idea is that a set of admissible alternatives becomes an actual outcome when the relevant constraint structure eliminates all but one viable alternative. The present paper does not assume that this proposal is correct. It asks whether a specific experimental consequence of such a proposal can be made precise, tested, and exposed to failure.
The selection-law framing is valuable because it forces the theory to move beyond interpretation. If CBR is to carry empirical content, it must identify a condition under which outcome realization produces behavior not already absorbed by standard quantum mechanics, decoherence modeling, or known apparatus effects. This paper proposes operational record accessibility as that condition.
1.2 Why CBR needs an experimental centerpiece
CBR requires an experimental centerpiece because a realization framework without empirical vulnerability remains underdetermined. Compatibility with known quantum phenomena is not enough. A serious model must also say where it could fail.
This paper therefore formulates a strong-null interferometric protocol. The observable is interference visibility V(η), where η denotes normalized accessible which-path mutual information. The standard baseline is V_SQM(η). The tested CBR model is:
V_CBR(η) = V_SQM(η) + L(η)
where L(η) is a localized accessibility-dependent term near η_c.
The purpose of the experiment is not to prove CBR. It is to determine whether a CBR-type accessibility term is required beyond the smooth SQM/decoherence envelope.
1.3 Central question
The central question is:
Does interference visibility depend only on smooth decoherence variables, or can operational record accessibility introduce a distinct realization signature?
The critical region is:
N(η_c) = [η_c − δ, η_c + δ]
The experimental discriminator is whether V_obs(η) remains smooth and contained within:
V_SQM(η) ± Δ_nuisance(η)
or whether it shows a localized deviation near η_c that cannot be absorbed into standard nuisance effects.
1.4 Primary prediction
The tested CBR accessibility model predicts:
V(η) remains within the SQM/decoherence envelope away from η_c, but near η_c exhibits a bounded kink, slope change, threshold-like suppression, or nonanalytic deviation of minimum size ε.
Formally:
V_CBR(η) = V_SQM(η) + L(η)
with:
|L(η)| ≥ ε
for at least one η inside N(η_c).
This is the paper’s primary empirical commitment. The model does not predict arbitrary anomalies. It predicts a localized accessibility signature in a pre-specified transition region.
1.5 Claims hierarchy
The paper’s claims are ordered as follows.
Claim 1: Standard quantum/decoherence modeling predicts a smooth baseline V_SQM(η) within calibrated nuisance bounds.
Claim 2: The tested CBR model predicts V_CBR(η) = V_SQM(η) + L(η).
Claim 3: The empirical discriminator is whether L(η) is localized near η_c and exceeds ε after nuisance effects are bounded.
Claim 4: A strong null disconfirms the tested model if no resolvable L(η) appears despite sensitivity sufficient to detect ε.
This hierarchy prevents the protocol from being interpreted as a general proof or refutation of all possible CBR variants. It tests one defined accessibility model.
1.6 Strongest honest claim
The strongest honest claim is that this protocol tests whether a CBR-type accessibility term is required beyond smooth decoherence models.
A positive result would require a reproducible deviation near η_c exceeding Δ_nuisance(η) and σ_total(η), surviving artifact controls, and remaining localized to N(η_c). A strong null would disconfirm the tested CBR accessibility model if V_obs(η) remains smooth and fully contained within the SQM/decoherence nuisance envelope across N(η_c), with sufficient sensitivity to detect ε.
1.7 Non-negotiable falsifiability condition
If η is not independently calibrated, if η_c is selected after observing V_obs(η), or if L(η) is allowed to absorb ordinary nuisance effects, the protocol is not a valid test of the CBR accessibility model.
These requirements are not optional refinements. They are what make the experiment capable of failure. Without them, the model could be adjusted after the fact to accommodate almost any result.
1.8 Paper roadmap
Section 2 reviews interference visibility, which-path information, decoherence, and delayed-choice quantum eraser logic. Section 3 states CBR in experimental form. Section 4 defines the exact CBR model tested. Section 5 defines η operationally as normalized accessible which-path mutual information. Later sections construct the SQM/decoherence baseline, specify the experimental platform, define statistical decision rules, and formalize strong-null falsification.
The next section establishes the standard conceptual background against which the accessibility-signature claim must be judged.
2. Conceptual Background
2.1 Interference visibility
Interference visibility V measures the contrast of an interference pattern:
V = (I_max − I_min) / (I_max + I_min)
where I_max and I_min are the maximum and minimum observed intensities, count rates, or coincidence rates under a fixed measurement condition.
In this protocol, visibility is measured as a function of record accessibility:
V_obs(η)
The standard prediction is:
V_SQM(η)
The tested CBR prediction is:
V_CBR(η)
The issue is not whether visibility can decrease. Standard quantum mechanics already predicts that interference visibility changes when which-path information, distinguishability, or decoherence changes. The issue is whether V_obs(η) remains smooth and contained within the standard nuisance envelope, or whether a localized accessibility-dependent term L(η) is required.
2.2 Which-path information
Which-path information is information capable of distinguishing between alternative paths in an interferometric arrangement. Increased which-path distinguishability is ordinarily associated with reduced interference visibility.
This paper distinguishes physical correlation from operational accessibility. A path variable may be correlated with another system, but the relevant question here is whether the record is accessible under the experimental conditions. CBR’s tested claim concerns accessible record structure, not merely abstract correlation.
Let W denote the which-path variable and R denote the accessible idler record. The key quantity is the accessible mutual information between W and R.
2.3 Decoherence and smooth visibility loss
Decoherence explains the suppression of interference through entanglement with environmental or uncontrolled degrees of freedom. In controlled interferometric settings, decoherence-based visibility loss is expected to vary smoothly with distinguishability, coupling strength, loss, and other calibrated parameters.
The standard baseline is:
V_SQM(η)
The nuisance-bounded standard prediction is:
V_SQM(η) ± Δ_nuisance(η)
where Δ_nuisance(η) includes systematic effects such as phase noise, detector inefficiency, dark counts, accidental coincidences, mode mismatch, idler loss, imperfect erasure, alignment instability, and timing jitter.
The CBR accessibility claim becomes meaningful only if this standard baseline is fixed tightly enough that not every deviation can be absorbed into nuisance uncertainty.
2.4 Delayed-choice quantum eraser logic
Delayed-choice quantum eraser experiments are useful because they separate signal interference from later conditions governing the accessibility or erasure of idler-side which-path information. They allow the experimentalist to vary record accessibility while preserving a clear distinction between signal behavior and idler-record treatment.
This paper does not rely on retrocausal interpretation. The delayed-choice structure is used because it provides a controlled way to vary η and examine whether V_obs(η) follows the smooth standard baseline.
2.5 Why this paper is not a standard quantum eraser repeat
The target is not erasure itself. The target is whether record accessibility has independent physical significance for outcome realization.
A standard quantum eraser experiment demonstrates the complementarity of interference and which-path information under different measurement bases. This protocol asks a narrower and more demanding question: when η is continuously and independently calibrated, does visibility remain smooth, or does it show a localized deviation near η_c?
The tested CBR signature must satisfy:
|V_CBR(η) − V_SQM(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
If V_obs(η) remains smooth and within the SQM/decoherence nuisance envelope across that region, with sufficient sensitivity, the tested CBR accessibility model is disconfirmed.
3. Constraint-Based Realization in Experimental Form
3.1 Minimal CBR postulate
The minimal CBR postulate is:
Outcome realization occurs when the relevant constraint structure eliminates all but one admissible outcome.
Let A = {a₁, a₂, …, a_n} denote the set of admissible outcome alternatives. Realization occurs when the operative constraint structure reduces A to a singleton set:
A → {a_k}
This postulate is not yet a complete theory. It becomes testable only when the relevant constraints are connected to measurable quantities. In this paper, the measurable constraint variable is record accessibility η.
3.2 Realization layer versus unitary dynamics
CBR, as tested here, does not replace standard unitary dynamics or decoherence modeling. The standard formalism supplies the baseline behavior of the interferometric system. CBR contributes only a proposed realization-layer term:
V_CBR(η) = V_SQM(η) + L(η)
This distinction is essential. The paper does not claim that standard quantum mechanics fails generically. It asks whether one accessibility-dependent term is needed under a specific, calibrated protocol.
3.3 Accessibility as a constraint variable
The tested CBR model treats operational record accessibility as a possible constraint variable. The relevant question is whether accessible which-path information changes the admissibility structure of outcomes in a way that cannot be reduced to smooth decoherence.
The variable η is not a loose label for “information.” It is defined as normalized accessible which-path mutual information. The test therefore asks whether increasing η produces only the smooth behavior predicted by V_SQM(η), or whether a localized deviation L(η) appears near η_c.
3.4 Local decoherence versus global record accessibility
Local decoherence concerns suppression of interference through entanglement, distinguishability, environmental coupling, phase instability, or loss of coherent overlap. Global record accessibility concerns whether which-path information is operationally available as a record in the full experimental arrangement.
The burden on CBR is not to show that records matter in a general sense. Standard quantum mechanics already accounts for record-dependent interference effects. The burden is sharper: CBR must predict a localized accessibility signature that exceeds the calibrated SQM/decoherence nuisance envelope.
3.5 Tested model scope
This paper tests a specific CBR accessibility model, not every possible version of CBR.
The model has four commitments:
η is normalized accessible which-path mutual information.
L(η) is localized near η_c.
The predicted deviation has minimum size ε inside N(η_c).
A strong null disconfirms the tested model if V_obs(η) remains smooth and within the SQM/decoherence envelope with sensitivity sufficient to detect ε.
This scope restriction is what makes the paper scientifically useful. The model is not allowed to retreat into unfalsifiable generality.
4. Exact CBR Model Tested
4.1 Primary model
The tested model is:
V_CBR(η) = V_SQM(η) + L(η)
where:
V_SQM(η) is the standard quantum/decoherence baseline.
L(η) is the proposed CBR accessibility term.
V_obs(η) is the measured visibility.
The null model is:
V_obs(η) = V_SQM(η) + noise + nuisance
The CBR model is:
V_obs(η) = V_SQM(η) + L(η) + noise + nuisance
The experiment asks whether L(η) is required after all ordinary noise and nuisance effects are bounded.
4.2 Accessibility-transition region
The critical accessibility value is:
η_c ∈ (0,1)
The transition neighborhood is:
N(η_c) = [η_c − δ, η_c + δ]
The values of η_c and δ must be specified before analysis. They cannot be chosen after inspecting V_obs(η).
The region N(η_c) is where the tested model accepts empirical risk. Outside this region, ordinary SQM-like behavior may be expected. Inside this region, the tested CBR model predicts a resolvable accessibility signature.
4.3 Signature function
The signature function is:
L(η) = V_CBR(η) − V_SQM(η)
The model predicts:
|L(η)| ≥ ε
for at least one η inside N(η_c).
The experiment is strong only if the predicted ε exceeds the minimum detectable deviation ε_min. A stricter sufficient condition is:
ε > Δ_nuisance(η) + σ_total(η)
inside N(η_c).
4.4 Admissibility conditions for L(η)
The term L(η) is admissible as a CBR accessibility signature only if it satisfies all of the following conditions.
It must be localized near η_c.
It must be pre-specified before analysis.
It must be at least ε in magnitude.
It must exceed Δ_nuisance(η) and σ_total(η).
It must not be absorbable into ordinary decoherence, loss, or calibration drift.
It must be absent in loss-only, sham-erasure, idler-blocked, and phase-drift controls.
It must remain stable under η re-calibration and replication.
These restrictions prevent L(η) from becoming a free residual term. A model that can fit any anomaly after the fact is not being tested.
4.5 Smoothness violation
The predicted signature may appear as a bounded kink, slope discontinuity, threshold-like suppression, or nonanalytic deviation. The common feature is localized departure from the smooth SQM/decoherence envelope near η_c.
A broad deviation across all η values would not be strong evidence for CBR. It would more likely indicate an incomplete baseline, uncontrolled apparatus drift, or an unmodeled systematic effect. The CBR-type signature must be both localized and artifact-resistant.
4.6 Model failure condition
The tested CBR accessibility model is disconfirmed if calibrated experiments show that V_obs(η) remains smooth and fully contained inside the SQM/decoherence nuisance envelope across N(η_c), with sensitivity sufficient to detect ε.
This is the strong-null condition. It is the point at which the paper becomes experimentally serious. The model does not merely seek confirmatory anomalies; it accepts a defined result that counts against it.
5. Operational Definition of η
5.1 Primary definition
The primary definition of η is:
η = I_acc(W;R) / H(W)
where:
W is the which-path variable.
R is the accessible idler record.
I_acc(W;R) is the accessible mutual information between W and R.
H(W) is the maximum path entropy.
Thus:
η = 0 means I_acc(W;R) = 0.
η = 1 means I_acc(W;R) = H(W).
0 < η < 1 means partial accessible which-path information.
This definition is preferred because it ties η to operationally accessible record content rather than abstract correlation or raw detector settings.
5.2 Secondary calibrators
Secondary calibrators include retrieval fidelity, idler distinguishability, detector efficiency, storage/recovery success, and coincidence recoverability.
These quantities may support or cross-check the η assignment, but they do not replace the primary definition. If secondary calibrators conflict with I_acc(W;R), the η calibration must be treated as unresolved.
5.3 Independent η measurement
η must be measured independently from V_obs(η). This is mandatory. If η is inferred from visibility, the experiment becomes circular.
Independent calibration requires idler-side record characterization, distinguishability checks, mutual-information estimation, and control measurements that do not use the signal visibility curve as the defining input.
The analysis pipeline must therefore treat η as the independent variable and V_obs(η) as the dependent observable.
5.4 Calibration protocol
The calibration protocol begins by establishing η = 0, where no usable which-path record is recoverable above the noise floor. It then establishes η = 1, where accessible which-path mutual information reaches H(W) within apparatus limits. Intermediate η values are produced through controlled partial idler accessibility, such as tunable distinguishability, partial erasure, calibrated retrieval loss, detector gating, or controlled storage/recovery.
For each setting, I_acc(W;R) is estimated independently and normalized by H(W). Uncertainty in η must be propagated into σ_total(η) and into the transition-region statistic T_c.
The calibration must also verify that changing η does not introduce uncontrolled changes in phase, mode overlap, detector response, polarization alignment, or signal loss.
5.5 Separation from ordinary loss
η must be separated from ordinary loss and apparatus imperfection. Photon loss can reduce count rates without increasing record accessibility. Detector inefficiency can mimic inaccessible records. Phase drift can reduce visibility without changing η. Post-selection can create artificial visibility changes.
For that reason, the experiment requires loss-only controls, sham-erasure controls, idler-blocked controls, phase-drift controls, and calibration-leakage checks.
A claimed CBR-type accessibility signature is credible only if it remains localized near η_c after these controls are applied.
5.6 Falsifiability role of η
η is the hinge of the experiment. If η is poorly defined, the protocol cannot distinguish CBR from ordinary decoherence or experimental artifact.
A valid test requires:
η is independently calibrated.
η uncertainty is included in σ_total(η).
η_c is fixed before analysis.
η variation is not reducible to loss or detector inefficiency.
η assignments are reproducible across calibration runs.
With η operationally fixed, the next step is to construct the standard quantum/decoherence baseline against which any accessibility signature must be judged.
6. Standard Quantum / Decoherence Baseline
6.1 Baseline function
The standard quantum/decoherence baseline is the reference model against which the tested CBR accessibility term is evaluated. It is denoted:
V_SQM(η)
This function represents the visibility expected from standard quantum mechanics, ordinary decoherence, distinguishability, imperfect erasure, calibrated optical loss, detector limitations, and other apparatus effects known before unblinding.
The baseline must be constructed by one of three pre-specified methods: a first-principles SQM/decoherence model, a calibration-derived empirical model, or a hybrid model combining both. Whichever method is chosen, it must be fixed before the CBR analysis. V_SQM(η) cannot be adjusted after observing V_obs(η).
The observed visibility is:
V_obs(η)
The tested comparison is:
V_obs(η) versus V_SQM(η) ± Δ_nuisance(η)
A CBR-type deviation is meaningful only if it exceeds this envelope and cannot be absorbed into known systematic effects.
6.2 Smoothness expectation
Under standard quantum mechanics and decoherence modeling, controlled partial record accessibility should produce smooth visibility behavior when the relevant physical parameters are varied smoothly. The precise shape of V_SQM(η) depends on the apparatus, but the baseline should not contain a post-hoc kink, threshold, or nonanalytic feature placed near η_c to absorb the predicted CBR signature.
The smoothness expectation is therefore a modeling commitment, not a rhetorical contrast. If ordinary decoherence, distinguishability, idler loss, imperfect erasure, and detector effects fully account for the visibility curve, then V_obs(η) should remain inside the calibrated SQM/decoherence envelope.
6.3 Nuisance envelope
The nuisance-bounded standard prediction is:
V_SQM(η) ± Δ_nuisance(η)
where Δ_nuisance(η) represents systematic uncertainty from known non-CBR effects. This envelope must be estimated before evaluating the CBR claim. It may include uncertainty from phase noise, detector response, imperfect mode overlap, idler loss, timing jitter, and baseline-model uncertainty.
The total uncertainty is:
σ_total(η)
A candidate CBR signature must satisfy:
|V_obs(η) − V_SQM(η)| > σ_total(η)
and, for the model-level claim:
|V_obs(η) − V_SQM(η)| ≥ ε
inside N(η_c).
If Δ_nuisance(η) must be expanded after unblinding to cover unexplained structure, the result should be classified as inconclusive, not as evidence for or against CBR.
6.4 Nuisance sources
Relevant nuisance sources include phase noise, detector inefficiency, dark counts, accidental coincidences, mode mismatch, polarization drift, spectral mismatch, idler loss, imperfect erasure, alignment instability, timing jitter, source brightness drift, coincidence-window bias, and post-selection bias.
Each source must be independently bounded, actively stabilized, or included in Δ_nuisance(η). The most dangerous artifacts are those that alter η and V_obs(η) together through ordinary optical mechanisms. For example, idler loss may reduce accessible record information while changing coincidence statistics. Phase drift may reduce visibility without changing η. Detector timing changes may reshape the apparent coincidence-conditioned visibility.
A claimed CBR-type signature must survive loss-only controls, sham-erasure controls, idler-blocked controls, phase-drift controls, timing-window controls, and calibration-leakage checks.
6.5 Baseline validation runs
Before evaluating CBR, the experiment must validate V_SQM(η). Baseline validation runs should show that the chosen SQM/decoherence model predicts control data within the stated nuisance envelope. These runs should include stable η endpoints, repeated visibility scans, and control configurations where no CBR-type accessibility transition is predicted.
If control data show unexplained structure near η_c, the experiment cannot proceed to CBR interpretation. The result must first be treated as a baseline or apparatus failure.
6.6 Validity gate for baseline use
Before any CBR claim is evaluated, the baseline must pass a validity gate:
V_SQM(η) is fixed before unblinding.
Δ_nuisance(η) is fixed or rule-bounded before unblinding.
Control data fall within the baseline envelope.
η calibration does not inject visibility structure.
No unexplained transition-like feature appears in control runs.
The apparatus can resolve deviations of size ε.
If any gate fails, the result is inconclusive. It is not supportive of CBR and not a strong null against CBR.
This section establishes the standard reference model. The next section states the conditional accessibility-signature theorem that defines when the tested CBR model becomes empirically distinguishable from that reference.
7. Conditional Accessibility-Signature Theorem
7.1 Theorem statement
Conditional Accessibility-Signature Theorem. If the tested CBR accessibility model is correct, and if outcome realization depends on global record accessibility in a way not reducible to local decoherence strength, then visibility V(η) should depart from the smooth SQM/decoherence envelope in the pre-specified accessibility-transition region N(η_c), provided the accessibility transition changes the admissible realization constraints by at least ε.
The tested model is:
V_CBR(η) = V_SQM(η) + L(η)
where:
L(η) = V_CBR(η) − V_SQM(η)
and:
|L(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
This theorem is conditional. It does not claim that CBR is established. It states what must be observed if this particular CBR accessibility model is to have empirical support.
7.2 Assumptions
The theorem depends on the following assumptions.
η is independently calibrated as normalized accessible which-path mutual information.
η variation is controlled without unbounded loss, drift, timing bias, or detector artifact.
V_SQM(η) is fixed before unblinding.
Δ_nuisance(η) is fixed or rule-bounded before unblinding.
η_c and δ are pre-specified.
ε is specified before interpretation.
The decision statistic is fixed before data inspection.
Artifact controls are passed before CBR interpretation.
Under these assumptions, the model accepts empirical risk. If V_obs(η) remains smooth and fully contained inside the SQM/decoherence nuisance envelope across N(η_c), with sensitivity sufficient to detect ε, the tested CBR accessibility model is disconfirmed.
7.3 Proof sketch
Suppose the standard baseline is smooth across the tested η range:
V_SQM(η)
Suppose further that the tested CBR model contributes a localized realization-layer term:
L(η)
near η_c. Then:
V_CBR(η) = V_SQM(η) + L(η)
By model commitment, if the accessibility transition is physically active, then there exists at least one η inside N(η_c) such that:
|L(η)| ≥ ε
Therefore:
|V_CBR(η) − V_SQM(η)| ≥ ε
If ε exceeds Δ_nuisance(η) and σ_total(η), the deviation is experimentally resolvable. If the experiment has this sensitivity and observes no such deviation, then the tested accessibility term is absent at the predicted scale.
The proof does not derive CBR from standard quantum mechanics. It derives the empirical consequence of adding the specified CBR accessibility term to the standard baseline.
7.4 Limits of the theorem
The theorem does not imply that every anomaly supports CBR. A deviation outside N(η_c), a deviation absorbed by Δ_nuisance(η), or a deviation caused by loss, drift, timing bias, calibration leakage, or post-selection is not a CBR-type accessibility signature.
The theorem also does not rule out every possible realization framework. It applies only to the model defined in this paper: fixed η, fixed η_c, fixed δ, fixed ε, localized L(η), and a locked decision rule.
7.5 Strong-null consequence
The strong-null consequence is direct:
If V_obs(η) remains smooth and fully contained inside V_SQM(η) ± Δ_nuisance(η) across N(η_c), and if ε ≥ ε_min, then the tested CBR accessibility model is disconfirmed.
This gives the theorem its practical value. It does not merely identify a possible positive signature. It also defines a result that counts against the model.
The next section turns this conditional theorem into a laboratory platform capable of controlling η and measuring V_obs(η) with the required stability.
8. Experimental Platform
8.1 Preferred platform
The preferred platform is a delayed-choice record-accessibility interferometer using entangled photon pairs. This architecture separates the signal system, where interference visibility is measured, from the idler system, where which-path record accessibility is controlled and calibrated.
The platform is suitable because it allows η to be varied while V_obs(η) is measured under stable signal-arm conditions. The aim is not to reproduce a generic quantum eraser demonstration, but to scan record accessibility and determine whether visibility remains inside the SQM/decoherence envelope or develops a localized signature near η_c.
8.2 Source
A practical implementation may use a spontaneous parametric down-conversion source producing entangled signal-idler photon pairs. The source must have adequate brightness, stable pair-production rate, low accidental coincidence fraction, and well-characterized spectral and polarization correlations.
Source characterization should include pair rate, heralding efficiency, bandwidth, spectral filtering, polarization fidelity, timing correlation, accidental-coincidence rate, and long-duration drift. Any source instability that correlates with η settings must be included in Δ_nuisance(η) or eliminated before interpretation.
8.3 Signal arm
The signal arm measures interference visibility. It should include a phase-stable interferometric arrangement with controlled path overlap, polarization alignment, spectral filtering, and detector timing.
Visibility extraction must be fixed before analysis. This includes the phase-scan procedure, binning rule, background subtraction method, coincidence-window width, fitting method, and uncertainty estimator.
For each η setting, the primary observable is:
V_obs(η)
The signal arm must be monitored continuously for phase drift, mode mismatch, polarization drift, detector response variation, and count-rate instability. If these quantities exceed pre-registered tolerances, the run fails the validity gate.
8.4 Idler arm
The idler arm creates, stores, degrades, erases, or reveals which-path records. Its purpose is to control η while minimizing unrelated changes to the signal arm.
The idler arm must allow independent estimation of:
I_acc(W;R)
so that:
η = I_acc(W;R) / H(W)
The idler apparatus may include tunable distinguishability elements, polarization analyzers, variable erasure optics, delay lines, storage/retrieval components, gated detectors, calibrated attenuators, or controllable record-degradation modules.
Any mechanism used to vary η must be paired with controls that determine whether the same mechanism changes visibility through ordinary loss, timing bias, or coincidence selection.
8.5 η-control mechanisms
Acceptable η-control mechanisms include tunable distinguishability, variable erasure, controlled storage retrieval, detector gating, delayed record availability, and calibrated partial idler loss. The strongest mechanisms are those that change accessible which-path mutual information while holding ordinary loss and count-rate structure approximately fixed.
If η is varied by loss, then matched loss-only controls are mandatory. If η is varied by erasure optics, sham-erasure controls are mandatory. If η is varied by timing or gating, timing-window controls are mandatory.
For every η setting, the experiment must report η, η uncertainty, count rate, accidental-coincidence rate, phase stability, and visibility uncertainty.
8.6 Timing structure
The delayed-choice ordering must be operationally specified. The protocol should document pair creation time, signal propagation, signal detection, idler manipulation, idler detection or storage, coincidence assignment, and data-window selection.
The purpose of the timing structure is not to establish retrocausality. It is to ensure that record accessibility is controlled independently of the signal visibility measurement and that no timing artifact generates a false accessibility signature.
Timing jitter, detector dead time, coincidence-window width, electronic delay, and gating latency must be included in the nuisance model.
8.7 Primary observable
The primary observable is:
V_obs(η)
The test asks whether:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across N(η_c), or whether:
|V_obs(η) − V_SQM(η)| ≥ ε
inside N(η_c), after accounting for σ_total(η).
The visibility measurement must use the same extraction method across all η settings. Any excluded data, failed scans, or rejected runs must be handled according to pre-registered criteria.
8.8 Secondary observables
Secondary observables include idler distinguishability, accessible mutual information, count rate, phase stability, coincidence visibility, detector timing, accidental-coincidence rate, retrieval fidelity, polarization stability, spectral stability, and source brightness.
These observables determine whether a candidate deviation is interpretable. If a visibility anomaly appears with uncontrolled drift in any secondary observable, the result is not a CBR-type signature unless the artifact channel is independently ruled out.
The platform section establishes how the experiment can be physically implemented. The next section defines the minimum viable experiment and the validity gates required before any result is interpreted.
9. Minimum Viable Experiment
9.1 One-platform first test
The minimum viable experiment should use one well-controlled optical platform before attempting broader replication. The purpose of the first test is not to establish universality, but to determine whether the predicted accessibility signature can be sought under conditions where the standard baseline, η calibration, nuisance envelope, and decision rule are all fixed before interpretation.
A single rigorous implementation is preferable to multiple underconstrained variants. The first experiment must be capable of producing either a meaningful candidate signature, a strong null, or an explicitly inconclusive result.
9.2 Experimental sequence
The experimental sequence is:
Baseline calibration.
η calibration.
Power analysis.
Visibility scan.
Nuisance-envelope estimation.
Blinded analysis.
Decision statistic evaluation.
Validity-gate review.
Baseline calibration establishes V_SQM(η). η calibration independently estimates accessible which-path mutual information. Power analysis determines whether ε can be resolved. The visibility scan measures V_obs(η). The nuisance-envelope estimation bounds known artifacts. Blinded analysis prevents post-hoc curve selection. The decision statistic evaluates the result. The validity-gate review determines whether the run is interpretable.
9.3 η scan
The η scan must include dense sampling near:
N(η_c) = [η_c − δ, η_c + δ]
It must also include η values below and above the transition region to test localization. Sparse sampling is insufficient because it may miss a narrow signature or create misleading interpolation artifacts.
η_c and δ must be fixed before unblinding. If a narrow η_c window is allowed, that window must be pre-registered and included in the multiple-comparison correction.
9.4 Control conditions
The minimum viable experiment requires:
η = 0.
η = 1.
Intermediate η values.
Loss-only condition.
Sham-erasure condition.
Idler-blocked condition.
Phase-drift control.
Timing-window control.
Detector-stability control.
Baseline-repeat control.
The η endpoints anchor the accessibility scale. Intermediate values test the visibility curve. Loss-only controls separate accessibility from attenuation. Sham-erasure controls separate record manipulation from procedural artifacts. Idler-blocked controls test coincidence artifacts. Phase and timing controls test interferometer and electronics stability. Baseline-repeat controls verify that V_SQM(η) remains stable across the run.
9.5 Data sufficiency
Data sufficiency must be specified before execution. The protocol must define minimum counts per η setting, number of repeated scans, acceptable η uncertainty, maximum phase drift, maximum accidental-coincidence fraction, detector-stability thresholds, and minimum resolvable deviation ε_min.
A null result is strong only if:
ε ≥ ε_min
and if the apparatus passes all validity gates.
If counts are inadequate, η calibration is unstable, or drift exceeds tolerance, the result is weak or inconclusive rather than disconfirming.
9.6 Validity gates
Before interpreting the result, the run must pass the following validity gates:
Baseline validation succeeds.
η calibration is stable.
η uncertainty is propagated into σ_total(η).
Nuisance envelope is adequate.
Counts meet pre-registered sufficiency thresholds.
Phase, timing, polarization, and detector stability remain within tolerance.
η_c and δ were not changed after observing V_obs(η).
No artifact control reproduces the candidate signature.
Power analysis confirms sensitivity to ε.
If any gate fails, the result is classified as inconclusive. It cannot be claimed as support for CBR or as a strong null against the tested model.
This section defines the minimum practical standard for an interpretable experiment. The next section specifies the effect-size and power requirements that make the strong-null claim quantitatively meaningful.
10. Effect-Size Commitment
10.1 Minimum detectable CBR deviation
The minimum detectable CBR deviation is:
ε_min
ε_min is the smallest localized visibility deviation the apparatus can reliably distinguish from statistical noise, systematic uncertainty, η uncertainty, and baseline-model uncertainty. It must be determined before interpretation through simulation, calibration data, and power analysis.
ε_min cannot be assigned after observing the result. If ε_min is estimated post hoc, the strong-null claim loses force.
10.2 Predicted effect size
The tested model predicts:
|V_CBR(η) − V_SQM(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
Equivalently:
|L(η)| ≥ ε
inside the transition region.
The parameter ε is the model’s empirical commitment. It may be theoretically derived, bounded, or specified as a testable benchmark, but it must be fixed before the experiment is interpreted.
10.3 Sensitivity requirement
For a strong test, the predicted deviation must exceed the combined uncertainty and nuisance envelope:
ε > Δ_nuisance(η) + σ_total(η)
inside N(η_c).
Define the sensitivity margin:
M(η) = ε − [Δ_nuisance(η) + σ_total(η)]
A strong test requires M(η) > 0 for the relevant η values inside N(η_c). If M(η) ≤ 0, a null result cannot disconfirm the tested model.
10.4 Power analysis
Before data collection, the experiment must perform a power analysis estimating the probability of detecting a deviation of size ε under the planned sampling, count rates, η uncertainty, and nuisance envelope.
The power analysis should determine:
whether ε ≥ ε_min;
how many η points are needed inside N(η_c);
how many repeated scans are required;
what count rates are sufficient;
how η uncertainty affects T_c;
how large Δ_nuisance(η) can be before the test becomes inconclusive.
This analysis defines whether the experiment is capable of producing a strong null.
10.5 Strong-null adequacy
A null result is meaningful only if the apparatus could have resolved ε. The strong-null condition is:
V_obs(η) remains smooth and fully contained inside V_SQM(η) ± Δ_nuisance(η) across N(η_c), while ε ≥ ε_min and all validity gates are passed.
If this condition is satisfied, the tested CBR accessibility model is disconfirmed. If the apparatus lacks sensitivity, the null is weak. If nuisance effects or calibration instability dominate, the result is inconclusive.
The effect-size commitment and power analysis complete the quantitative burden of the protocol. The following sections specify how simulation, statistical decision rules, pre-registration, and blinded analysis enforce that burden without post-hoc adjustment.
11. Simulation Budget
11.1 Purpose
The simulation budget determines whether the proposed experiment is capable of resolving the predicted CBR accessibility signature before laboratory interpretation begins. Its purpose is not to generate evidence for CBR, but to establish whether the planned apparatus, sampling density, η calibration, nuisance envelope, and statistical decision rule can distinguish a localized term L(η) from the standard SQM/decoherence baseline.
The simulation must test both positive-detection and strong-null scenarios. A valid protocol must answer two questions: whether a deviation of size ε inside N(η_c) would be detectable if present, and whether the absence of such a deviation would meaningfully disconfirm the tested CBR accessibility model.
11.2 Simulated curves
The simulation should generate:
V_SQM(η)
V_CBR(η)
V_obs(η)
Δ_nuisance(η)
The standard baseline is V_SQM(η). The tested CBR model is:
V_CBR(η) = V_SQM(η) + L(η)
where L(η) is localized near η_c and satisfies:
|L(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
The simulated V_obs(η) must include statistical noise, η-calibration uncertainty, baseline-model uncertainty, systematic uncertainty, and nuisance effects. The simulation must also include smooth-null cases where L(η) = 0, so that false-positive behavior can be evaluated.
11.3 Parameters
The minimum parameter set includes η_c, δ, ε, ε_min, detector noise, phase drift, timing jitter, accidental coincidence fraction, visibility floor, count rate, η uncertainty, sampling density, and baseline-model uncertainty.
The simulation should vary these parameters across plausible ranges rather than assuming ideal conditions. It must determine how dense the η scan must be near η_c, how small Δ_nuisance(η) must be, and how stable η calibration must remain for T_c to be meaningful.
11.4 Sensitivity floor
The sensitivity floor is:
ε_min
A strong test requires:
ε ≥ ε_min
and preferably:
ε > Δ_nuisance(η) + σ_total(η)
inside N(η_c).
ε_min must be estimated before experimental interpretation. If ε_min exceeds ε, the experiment may still provide useful calibration data, but it cannot produce a strong null against the tested CBR accessibility model.
11.5 Simulation failure modes
The simulation must identify conditions under which the experiment is underpowered before data collection. The protocol should be classified as insufficient for a strong test if:
ε < ε_min.
η uncertainty is largest or unstable inside N(η_c).
Δ_nuisance(η) is wide enough to absorb L(η).
The false-positive rate under smooth-null simulations is too high.
Sampling near η_c is too sparse to resolve a localized kink.
Power analysis shows low probability of detecting ε.
Artifact controls cannot distinguish accessibility from loss, drift, timing bias, or post-selection.
If any of these conditions occur, the experiment should be redesigned or classified as exploratory.
11.6 Strong-null simulation
The strong-null simulation should generate smooth visibility data consistent with:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across N(η_c), while assuming an apparatus capable of resolving ε.
A strong null requires more than failure to observe a deviation. It requires demonstrated sensitivity to the predicted deviation. Therefore, the simulation must show that if L(η) of size ε had been present, the planned analysis would have detected it with pre-specified power.
This section establishes the quantitative feasibility of the test. The next section defines the statistical and model-selection framework that converts simulated and experimental visibility data into interpretable outcomes.
12. Statistical Decision Framework
12.1 Primary statistic
The primary statistic is:
T = maxη |V_obs(η) − V_SQM(η)| / σ_total(η)
This statistic measures the largest standardized departure of the observed visibility from the standard SQM/decoherence baseline across the full η scan. It is useful for detecting unexpected deviations, but it is not sufficient to support the tested CBR accessibility model. A large T outside N(η_c) may indicate apparatus drift, baseline failure, or an unmodeled systematic effect.
For CBR interpretation, the deviation must be localized near η_c, exceed the predicted effect size ε, survive artifact controls, and improve the pre-registered model comparison relative to V_SQM(η).
12.2 Transition-region statistic
The transition-region statistic is:
T_c = maxη∈N(η_c) |V_obs(η) − V_SQM(η)| / σ_total(η)
This is the primary statistic for the tested CBR model because the predicted signature is localized inside:
N(η_c) = [η_c − δ, η_c + δ]
A candidate CBR-type signature requires T_c to exceed the pre-registered detection threshold while also satisfying:
|V_obs(η) − V_SQM(η)| ≥ ε
for at least one η inside N(η_c).
12.3 Model-selection requirement
Detection should not be based only on a large residual. The CBR model must provide better explanatory performance than the standard baseline under a pre-registered model-selection rule.
The comparison is between:
V_obs(η) = V_SQM(η) + noise + nuisance
and:
V_obs(η) = V_SQM(η) + L(η) + noise + nuisance
Because the CBR model adds structure through L(η), the decision rule must penalize extra flexibility. L(η) cannot be freely shaped after observing the data. Its allowed location, form class, minimum size ε, and relation to η_c must be fixed before unblinding.
A candidate signature requires that V_CBR(η) outperform V_SQM(η) specifically inside N(η_c), without degrading control-region performance or requiring post-hoc parameter changes.
12.4 Detection threshold
The detection threshold must be fixed before unblinding. It should account for statistical noise, η-scan density, multiple comparisons, nuisance uncertainty, model-selection penalty, and the expected false-positive rate under smooth-null simulations.
A result may be classified as a candidate CBR-type accessibility signature only if the deviation is localized inside N(η_c), exceeds the detection threshold, exceeds ε, lies outside Δ_nuisance(η), improves the pre-registered model comparison, and survives artifact controls.
A statistically large deviation outside the predicted region is not a CBR-type signature under the tested model.
12.5 Exclusion threshold
The exclusion threshold defines when the tested CBR accessibility model is disconfirmed. The strong-null condition is:
V_obs(η) remains smooth and fully contained inside V_SQM(η) ± Δ_nuisance(η) across N(η_c), while ε ≥ ε_min and all validity gates are passed.
Equivalently, the experiment excludes the tested model when no resolvable L(η) appears inside N(η_c), despite sensitivity sufficient to detect ε.
This exclusion threshold must be fixed before unblinding. It cannot be raised after a null result without invalidating the strong-null claim.
12.6 Multiple-comparison correction
Because the experiment scans multiple η values, the analysis must correct for multiple comparisons. This is especially important if N(η_c) contains several sampled points or if a narrow η_c window is allowed rather than a single fixed value.
The correction procedure must be specified before analysis. It may be based on simulation-derived thresholds, family-wise error control, false-discovery control, or another pre-registered method appropriate for the scan design.
The correction must distinguish between the full-scan statistic T and the transition-region statistic T_c. Since the tested model predicts localization near η_c, T_c carries the primary evidential burden.
12.7 Confidence criteria
The analysis should produce one of three classifications.
A CBR-type signature is detected if V_obs(η) departs from V_SQM(η) inside N(η_c), exceeds ε, exceeds Δ_nuisance(η), passes the detection threshold, improves the pre-registered model comparison, and survives artifact controls.
A CBR-type signature is not detected, and the tested model is disconfirmed, if V_obs(η) remains smooth and within the nuisance envelope across N(η_c), the apparatus sensitivity satisfies ε ≥ ε_min, and all validity gates are passed.
The result is inconclusive if η calibration is unstable, the nuisance envelope is inadequate, the apparatus lacks sensitivity to ε, baseline validation fails, artifact controls reproduce the candidate deviation, or model-selection criteria are not met.
This framework prevents the experiment from collapsing into binary overstatement. It allows positive, negative, and inconclusive outcomes under pre-specified rules. The next section describes how those rules are locked before data collection.
13. Pre-Registration Protocol
Before data collection, the protocol must lock the elements required to make the test interpretable. Pre-registration is not an administrative add-on. It is part of the falsification structure because it prevents the model from being adjusted after observing V_obs(η).
The following elements must be fixed before experimental analysis:
η definition
η_c window
δ neighborhood
V_SQM model
Δ_nuisance(η) construction rule
ε threshold
ε_min estimation method
T and T_c statistics
model-selection rule
detection threshold
exclusion threshold
control conditions
artifact-rejection rules
validity gates
visibility extraction method
η-calibration procedure
multiple-comparison correction
failed-run criteria
unblinding sequence
The protocol, code, parameters, thresholds, and exclusion rules should be frozen before data collection. Ideally, this should be done in a registered-report format, where the experimental logic and decision rules are reviewed before results are known.
The pre-registration must also define how failed runs are handled. Excluding data after inspection can introduce bias, so rejection criteria must be based on pre-specified stability, count-rate, timing, detector, calibration, or source-performance thresholds.
The strongest version of the protocol fixes η_c and δ before unblinding. If theory permits only a narrow transition window rather than a single η_c, that window must be declared in advance and reflected in the statistical correction.
The pre-registration should state the strong-null standard explicitly:
The tested CBR accessibility model is disconfirmed if calibrated experiments show that V_obs(η) remains smooth and fully contained inside the SQM/decoherence nuisance envelope across N(η_c), with sensitivity sufficient to detect ε.
This section locks the test before observation. The next section describes the blinded analysis and audit procedures that preserve this commitment during data processing.
14. Blinded Analysis
14.1 Blinded η labels
Blinded analysis reduces the risk that expectation influences curve fitting, data exclusion, or interpretation. In the preferred implementation, η labels should be blinded or partially masked during visibility extraction and initial quality review. The analyst may process interference data and estimate visibility without knowing whether a given setting lies inside or outside N(η_c).
Blinding is especially important because the predicted CBR signature is localized. If the analyst knows which points fall near η_c, ordinary discretion in fitting, binning, or outlier handling could unintentionally bias the result.
14.2 Locked analysis pipeline
The analysis pipeline must be locked before unblinding. This includes visibility extraction, background subtraction, fitting procedure, uncertainty estimation, η uncertainty propagation, nuisance-envelope application, model-selection calculation, and evaluation of T and T_c.
The pipeline must treat all η settings consistently. Any exceptional handling of a data point must be justified by pre-registered criteria, not by whether the point supports or weakens the CBR prediction.
14.3 No post-hoc η_c selection
η_c cannot be selected after observing V_obs(η). Post-hoc selection of η_c would make the model too flexible, allowing any localized fluctuation to be reinterpreted as the predicted transition.
If the theory allows uncertainty in η_c, the allowed window must be fixed in the pre-registration protocol. The statistical decision rule must then account for that window through the multiple-comparison correction.
14.4 No post-hoc curve fitting
The CBR term L(η) cannot be fitted freely after data inspection. Its allowed form, localization, minimum size ε, and relation to η_c must be specified before interpretation.
Post-hoc curve fitting is especially dangerous because many nuisance effects can produce local structure in visibility data. A candidate signature must not be defined as whatever residual remains after fitting V_SQM(η). It must be a pre-specified deviation class evaluated against locked thresholds.
14.5 Audit trail
The experiment must maintain a timestamped audit trail documenting exclusions, recalibrations, failed runs, source instabilities, code changes, threshold changes, parameter freezes, and the unblinding sequence.
Any deviation from the pre-registered protocol must be documented and justified. If the deviation affects η, η_c, δ, ε, V_SQM(η), Δ_nuisance(η), σ_total(η), T, T_c, or the model-selection rule, the result should be downgraded to exploratory unless the change was specified in advance.
14.6 Independent replication package
The analysis should produce a replication package containing the fixed V_SQM(η), η calibration procedure, nuisance-envelope construction, visibility extraction code or algorithmic description, simulation and power-analysis outputs, decision thresholds, audit log, and artifact-control outcomes.
The purpose of the replication package is to make the result inspectable. Whether the outcome is positive, null, or inconclusive, an independent group should be able to determine how η was assigned, how V_obs(η) was extracted, how Δ_nuisance(η) was built, how T_c was evaluated, and whether the strong-null standard was actually met.
This section protects the analysis from post-hoc flexibility. The next section addresses the rival explanations that must be eliminated before any deviation can be interpreted as a CBR-type accessibility signature.
15. Rival Explanation Elimination
15.1 Ordinary decoherence
Ordinary decoherence is the primary rival explanation. If observed visibility behavior can be modeled by standard decoherence, distinguishability, environmental coupling, imperfect erasure, or known apparatus effects, then no CBR-type accessibility term is required.
A candidate CBR signature must therefore exceed:
V_SQM(η) ± Δ_nuisance(η)
inside N(η_c). It must not merely show reduced visibility. Visibility loss alone is expected under standard quantum mechanics when which-path information or decoherence increases.
15.2 Idler loss
Idler loss can reduce accessible which-path information and alter coincidence statistics. It can therefore mimic changes in η while producing ordinary visibility artifacts.
The experiment must include loss-only controls in which idler loss is varied without introducing the intended accessibility transition. If the candidate signature appears in the loss-only control, it is not evidence for the tested CBR model.
15.3 Detector inefficiency
Detector inefficiency can distort count rates, reduce apparent record accessibility, and alter coincidence-conditioned visibility. It may also vary across η settings if detector gates, thresholds, or timing windows are changed.
Detector efficiency must be calibrated and monitored. A candidate signature must remain after detector-response corrections and must not coincide with detector instability.
15.4 Phase drift
Phase drift can reduce or distort measured visibility without changing record accessibility. Because the primary observable is interference visibility, phase stability is a critical control variable.
The experiment must monitor phase drift continuously or through repeated reference scans. If the apparent CBR-type deviation coincides with phase instability, the result is inconclusive unless the phase effect is independently bounded and shown insufficient to explain the deviation.
15.5 Mode mismatch
Mode mismatch can reduce interference contrast by changing spatial, spectral, temporal, or polarization overlap. Such mismatch may vary with η-control settings if optical components are adjusted between conditions.
Mode overlap must be characterized across the η scan. A deviation attributed to CBR must not track ordinary mode-overlap degradation.
15.6 Polarization drift
Polarization drift can change both interference visibility and idler distinguishability. It is especially relevant in SPDC-based implementations where polarization correlations may define or encode which-path information.
Polarization stability must be monitored throughout the experiment. If the candidate deviation is reproduced by polarization drift controls, it cannot be interpreted as a CBR-type accessibility signature.
15.7 Post-selection bias
Post-selection can create apparent visibility changes by changing which events are included in coincidence-conditioned subsets. Since delayed-choice and quantum eraser experiments often rely on coincidence conditioning, this artifact must be treated with particular care.
The inclusion criteria for events, coincidence windows, background subtraction, and conditioning rules must be fixed before unblinding. A candidate signature must remain under pre-registered robustness checks and must not disappear when post-selection choices are varied within allowed control ranges.
15.8 Accidental coincidences
Accidental coincidences can reduce apparent visibility or create spurious structure in V_obs(η). Their rate may vary with source brightness, detector timing, idler loss, or gating.
The experiment must estimate accidental coincidences independently and include their effect in σ_total(η) and Δ_nuisance(η). If the candidate deviation is explained by accidental-coincidence variation, it is not a CBR-type signature.
15.9 Calibration leakage
Calibration leakage occurs when information from the visibility scan influences η assignment, nuisance-envelope construction, or baseline selection. This can produce circular confirmation.
To avoid leakage, η must be calibrated independently from V_obs(η), and V_SQM(η) must be fixed before CBR interpretation. Any adjustment of η_c, δ, ε, V_SQM(η), or Δ_nuisance(η) after inspecting visibility data invalidates the strong-test classification.
15.10 Timing artifacts
Timing artifacts may arise from detector jitter, electronic delay, gating latency, coincidence-window selection, or unequal path delays. These effects can distort coincidence-conditioned visibility and may correlate with idler accessibility settings.
The timing structure must be documented, calibrated, and included in the nuisance model. Timing-window controls are required when η-control mechanisms involve gating, delayed detection, storage, or retrieval.
15.11 Interpretive burden rule
A deviation is not evidence for a CBR-type accessibility signature merely because it is unusual. It becomes a candidate signature only after standard quantum/decoherence modeling, ordinary optical artifacts, calibration leakage, and post-selection effects are shown insufficient to explain the effect within the pre-registered uncertainty budget.
This rule places the burden on the CBR interpretation. The default interpretation of an unexpected deviation is artifact, incomplete baseline modeling, or uncontrolled systematic error until those explanations are bounded below the observed effect size.
15.12 Rule for rejecting artifact explanations
A claimed CBR-type signature must satisfy all of the following conditions:
It occurs inside N(η_c).
It exceeds ε.
It exceeds Δ_nuisance(η) and σ_total(η).
It improves the pre-registered model comparison.
It survives loss-only, sham-erasure, idler-blocked, phase-drift, timing-window, detector-stability, and calibration-leakage controls.
It remains stable under η re-calibration.
It is not reproducible by ordinary decoherence or apparatus models within the pre-registered nuisance envelope.
If these conditions are not met, the result is either inconclusive or attributable to a rival explanation. The next section formalizes how positive, weak-null, strong-null, and decisive-null outcomes should be classified.
16. Null-Result Hierarchy
16.1 Weak null
A weak null occurs when no CBR-type accessibility signature is observed, but the experiment lacks the sensitivity, calibration stability, or nuisance control required to disconfirm the tested model.
A weak null may occur if:
ε < ε_min.
η uncertainty is too large near η_c.
Δ_nuisance(η) is wide enough to absorb L(η).
Counts are insufficient.
Baseline validation is incomplete.
Artifact controls fail or remain ambiguous.
A weak null is an underpowered or inconclusive non-detection, not evidence against CBR.
16.2 Strong null
A strong null occurs when no CBR-type accessibility signature is observed under conditions sufficient to detect the predicted effect.
The strong-null condition is:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across:
N(η_c) = [η_c − δ, η_c + δ]
while:
ε ≥ ε_min
and all validity gates are passed.
Under these conditions, the tested CBR accessibility model is disconfirmed.
16.3 Scope of disconfirmation
A strong null disconfirms the specific tested accessibility-signature model, not every possible version of CBR.
The disconfirmed model is the one with:
fixed η definition,
fixed η_c,
fixed δ,
fixed ε,
fixed L(η) class,
fixed V_SQM(η),
fixed Δ_nuisance(η),
and a pre-registered decision rule.
This scope matters. The result does not logically eliminate all realization-law approaches, but it does remove support for the defined accessibility-signature model at the tested effect scale.
16.4 Decisive null
A decisive null requires repeated strong-null outcomes across multiple implementations, η-calibration methods, apparatus configurations, and independent laboratories.
A decisive null requires stable V_SQM(η) baselines, independent η calibration, adequate sensitivity to ε, successful artifact controls, no localized deviation inside N(η_c), and reproducibility of the null result.
Such a result would substantially weaken the broader accessibility-signature program.
16.5 Interpretation
The null-result hierarchy prevents overstatement. Non-detection becomes disconfirmation only when the experiment had demonstrated ability to detect L(η) at the predicted scale.
Weak null: inconclusive non-detection.
Strong null: disconfirmation of the tested model.
Decisive null: repeated disconfirmation across robust implementations.
This hierarchy preserves falsifiability without allowing underpowered data to carry excessive interpretive weight.
17. Falsification Conditions
17.1 Boxed failure condition
The tested CBR accessibility model is disconfirmed if calibrated experiments show that V_obs(η) remains smooth and fully contained inside the SQM/decoherence nuisance envelope across N(η_c), with sensitivity sufficient to detect ε.
Formally:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
for η inside N(η_c), while:
ε ≥ ε_min
and all pre-registered validity gates are satisfied.
17.2 Positive-support condition
A positive-support result requires a reproducible, localized deviation near η_c:
|V_obs(η) − V_SQM(η)| ≥ ε
for at least one η inside N(η_c), with the deviation exceeding σ_total(η), improving the pre-registered model comparison, and surviving artifact controls.
Such a result would support the need for a CBR-type accessibility term in this protocol. It would not prove CBR as a complete theory.
17.3 Evidence asymmetry rule
A positive deviation is provisional until replicated and artifact-bounded. A strong null, if validity gates are passed, immediately disconfirms the tested CBR accessibility model at the specified ε scale.
This asymmetry is important. Positive results in precision interferometry are vulnerable to hidden systematics, calibration leakage, and post-selection effects. A strong null is cleaner because it directly tests the model’s pre-registered prediction and finds no resolvable L(η) where the model requires one.
17.4 Non-supportive results
Several outcomes are non-supportive even if anomalous.
A random anomaly outside N(η_c) is not supportive.
An uncalibrated visibility drop is not supportive.
A detector artifact is not supportive.
A deviation explained by loss, drift, timing bias, post-selection, or calibration leakage is not supportive.
A post-hoc fitted L(η) is not supportive.
A deviation absorbed by Δ_nuisance(η) is not supportive.
These outcomes are classified as artifact-driven, inconclusive, or baseline-model failures.
17.5 Exact scientific claim
The exact scientific claim is:
This experiment tests whether a CBR-type accessibility term L(η) is required beyond smooth SQM/decoherence models under a delayed-choice record-accessibility interferometric protocol.
A positive result motivates replication and refinement. A strong null disconfirms the tested model. Neither outcome solves the full measurement problem by itself.
18. Mock Results and Interpretation Matrix
18.1 Smooth null
A smooth null occurs when:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across the full η scan, including N(η_c).
Classification:
If ε ≥ ε_min and all validity gates are passed, the result is disconfirming for the tested CBR accessibility model.
If sensitivity is inadequate, the result is inconclusive.
18.2 Weak anomaly
A weak anomaly occurs when V_obs(η) departs from V_SQM(η), but the deviation fails one or more interpretive requirements.
Examples include a deviation smaller than ε, a deviation inside Δ_nuisance(η), an anomaly coincident with phase drift, or an effect that disappears under η re-calibration.
Classification:
Artifact-prioritized or inconclusive.
Not supportive of CBR.
18.3 Threshold/kink deviation near η_c
A threshold-like or kink-like deviation near η_c is the candidate positive result.
To qualify:
|V_obs(η) − V_SQM(η)| ≥ ε
inside N(η_c), while also exceeding σ_total(η), lying outside Δ_nuisance(η), improving the pre-registered model comparison, and surviving artifact controls.
Classification:
Provisionally supportive only if replicated and artifact-bounded.
Not definitive proof of CBR.
18.4 Deviation outside η_c
A deviation outside N(η_c) is not evidence for the tested CBR model, even if statistically significant.
Classification:
Inconclusive, artifact-prioritized, or evidence of incomplete baseline modeling.
Not supportive of the tested accessibility model.
18.5 Replication failure
Replication failure occurs when an initial candidate signature cannot be reproduced under the same η definition, comparable sensitivity, and equivalent validity gates.
Classification:
Not supportive.
The burden returns to artifact analysis and baseline review.
A single unreplicated deviation remains provisional.
19. Figures
19.1 Figure standards
Every figure must identify whether it is illustrative, simulated, calibration-derived, or empirical. Figures should show pre-registered quantities wherever relevant, including η_c, N(η_c), ε, V_SQM(η), Δ_nuisance(η), V_obs(η), and σ_total(η).
Uncertainty bands must be displayed when the figure supports an evidential claim. A curve without uncertainty should be treated as conceptual only.
19.2 Figure 1
Figure 1 should show the delayed-choice record-accessibility interferometer, including the entangled photon source, signal arm, idler arm, record-control module, η-calibration channel, coincidence logic, and visibility extraction stage.
19.3 Figure 2
Figure 2 should show the smooth SQM/decoherence baseline:
V_SQM(η)
with:
V_SQM(η) ± Δ_nuisance(η)
The figure should mark η_c and N(η_c) even if no CBR term is shown.
19.4 Figure 3
Figure 3 should show:
V_CBR(η) = V_SQM(η) + L(η)
with L(η) localized near η_c and a visible deviation of at least ε.
The figure should label the deviation as illustrative or simulated unless based on actual data.
19.5 Figure 4
Figure 4 should show the nuisance envelope and detectable region, including:
ε > Δ_nuisance(η) + σ_total(η)
inside N(η_c).
This figure should make clear when the test is powered enough to produce a strong null.
19.6 Figure 5
Figure 5 should show the strong-null decision tree: baseline validation, η calibration, power analysis, validity gates, candidate signature, weak null, strong null, inconclusive result, and artifact-driven anomaly.
19.7 Figure 6
Figure 6 should show simulation results under realistic noise: smooth-null simulations, injected CBR-signature simulations, and nuisance-dominated simulations.
19.8 Figure 7
Figure 7 should show mock result outcomes: smooth null, weak anomaly, localized η_c deviation, deviation outside η_c, and replication failure.
The purpose is to reinforce that only a localized, pre-registered, artifact-resistant deviation near η_c qualifies as a candidate accessibility signature.
20. Discussion
20.1 Why this paper is the centerpiece
This paper is the centerpiece because it converts CBR from a proposed realization framework into a laboratory-facing test. It specifies an observable, an accessibility parameter, a standard baseline, a predicted deviation, a nuisance envelope, an effect-size commitment, statistical decision rules, artifact controls, and a strong-null failure condition.
The value of the protocol lies in its vulnerability. CBR becomes scientifically sharper when it states what result would count against the tested model.
20.2 Difference from ordinary decoherence tests
This protocol is not a test of whether decoherence occurs. Decoherence is assumed within V_SQM(η).
The question is narrower:
Does operational record accessibility require a localized realization term beyond smooth decoherence modeling?
If V_obs(η) remains smooth and contained within V_SQM(η) ± Δ_nuisance(η), the tested model fails under strong-null conditions.
20.3 Relation to competing frameworks
The protocol does not globally confirm or refute Copenhagen, Everett, Bohmian mechanics, GRW-type collapse models, QBism, or decoherence.
It asks whether one observable behavior favors a CBR-type accessibility term. Standard decoherence predicts smooth visibility under controlled parameter variation. Other frameworks may reproduce the standard baseline unless supplemented with additional accessibility-dependent structure.
The comparison is operational: which framework predicts a localized deviation near η_c, and which does not?
20.4 Interpretation discipline
The paper’s success does not depend on a positive result. Its value is that it defines a fair test with meaningful positive, negative, and inconclusive outcomes.
A positive deviation is provisional until replicated and artifact-bounded. A strong null directly disconfirms the tested model at the specified ε scale if validity gates pass. An inconclusive result identifies what must be improved before the model can be tested.
20.5 Scientific value of a null result
A strong null would show that, under the tested conditions, operational record accessibility does not produce the predicted localized visibility deviation.
That result would narrow the viable form of CBR and strengthen the case that ordinary SQM/decoherence modeling is sufficient for this class of record-accessibility experiments.
20.6 Scientific value of a positive result
A positive result would not prove CBR. It would show that V_obs(η) contains a localized accessibility-dependent deviation not explained by the pre-registered SQM/decoherence baseline or known artifacts.
Such a result would justify replication, alternative η calibrations, independent apparatus implementations, and theoretical refinement of L(η). Its significance would depend on reproducibility and on whether rival explanations remain bounded below the observed effect size.
21. Limitations
21.1 η remains experimentally delicate
The central experimental variable η is also the most delicate part of the protocol. It is defined as normalized accessible which-path mutual information, but implementing that definition in a real apparatus requires careful separation between record accessibility, ordinary loss, detector response, timing structure, and post-selection. If η is not independently calibrated, the protocol cannot distinguish a CBR-type accessibility effect from a conventional artifact.
The intended definition is:
η = I_acc(W;R) / H(W)
where W is the which-path variable, R is the accessible idler record, I_acc(W;R) is the accessible mutual information between W and R, and H(W) is the maximum path entropy. This definition is operationally useful, but it places a demanding burden on the experiment. η must be measured without using V_obs(η) as an input, and uncertainty in η must be propagated into σ_total(η).
If η uncertainty becomes largest near η_c, the transition-region statistic T_c may lose interpretive value. In that case, a positive-looking deviation may be inconclusive, and a null result may be weak rather than strong.
21.2 Optical platforms may not exhaust realization contexts
The proposed delayed-choice record-accessibility interferometer is a suitable first platform because it permits controlled variation of idler-record accessibility while measuring signal visibility. However, an optical platform does not exhaust all possible realization contexts. If no CBR-type signature is detected in this protocol, the result disconfirms the tested accessibility model in this implementation and at the specified ε scale; it does not logically eliminate every possible realization-law model.
This limitation is not a weakness of the protocol. It is a necessary boundary on the claim. A strong null is meaningful precisely because it is specific:
fixed η definition,
fixed η_c,
fixed δ,
fixed ε,
fixed L(η) class,
fixed V_SQM(η),
fixed Δ_nuisance(η),
and fixed decision rule.
Broader conclusions require broader experimental coverage.
21.3 Effect-size uncertainty
The protocol requires an effect-size commitment:
|L(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
Yet ε may initially be difficult to derive from first principles. If ε is too loosely specified, the model becomes difficult to falsify. If ε is set below ε_min, the experiment cannot produce a strong null. If ε is set after data inspection, the test loses validity.
For this reason, ε must be fixed before interpretation. It may be theoretical, bounded, or benchmarked, but it cannot be adjusted to match the observed result. The experiment’s power analysis must establish whether:
ε ≥ ε_min
and whether:
ε > Δ_nuisance(η) + σ_total(η)
inside N(η_c).
If these conditions are not met, the result should be classified as exploratory or inconclusive.
21.4 Risk of overfitting
The CBR term L(η) must not become a flexible residual used to fit whatever structure remains after standard modeling. Overfitting is a major risk because precision interferometry can produce local deviations from many ordinary sources: drift, imperfect mode matching, detector instability, timing-window bias, accidental coincidences, and post-selection effects.
To prevent overfitting, L(η) must be pre-specified in location, magnitude, and allowed form class. The transition region N(η_c), the minimum deviation ε, and the model-selection rule must be locked before unblinding. A deviation supports the tested model only if it improves the pre-registered comparison between V_CBR(η) and V_SQM(η) while surviving artifact controls.
A post-hoc fitted L(η) is not evidence for CBR.
21.5 Positive result would not prove CBR final
A positive result would have limited but meaningful significance. It would indicate that V_obs(η) contains a localized accessibility-dependent deviation not explained by the pre-registered SQM/decoherence baseline or known artifacts. It would not prove CBR as a complete theory of measurement.
Such a result would require replication, alternative η calibrations, independent apparatus implementations, and theoretical refinement of L(η). It would also require continued comparison with standard quantum modeling and with any rival framework capable of reproducing the same localized signature.
The appropriate claim after a positive result would be:
A CBR-type accessibility term is empirically motivated in this protocol.
The inappropriate claim would be:
CBR has been proven as the final account of quantum measurement.
21.6 Strong null only rules out the tested model
A strong null has sharper disconfirming force than a positive result has confirming force, but its scope remains limited. If validity gates are passed and:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across N(η_c), with:
ε ≥ ε_min
then the tested CBR accessibility model is disconfirmed at the specified ε scale.
This does not rule out every possible CBR variant. It rules out the model defined by the paper’s pre-registered commitments. That limitation is scientifically appropriate. A test becomes meaningful by specifying what it can exclude.
These limitations define the boundary of the protocol’s claims. The conclusion now states why that boundary is not a defect, but the condition that makes the proposed experiment scientifically useful.
22. Conclusion
The Accessibility Signature Test is designed to make a proposed realization-law framework empirically vulnerable. The paper does not claim that Constraint-Based Realization is established physics. It defines a specific CBR accessibility model, states the conditions under which that model predicts a localized visibility deviation, and identifies the result that would disconfirm it.
The tested model is:
V_CBR(η) = V_SQM(η) + L(η)
where L(η) is localized near η_c and satisfies:
|L(η)| ≥ ε
for at least one η inside:
N(η_c) = [η_c − δ, η_c + δ]
The experiment’s central question is whether observed visibility follows the smooth SQM/decoherence baseline:
V_SQM(η) ± Δ_nuisance(η)
or whether a localized, artifact-resistant accessibility term is required.
The strong-null condition is the core of the protocol. The tested CBR accessibility model is disconfirmed if calibrated experiments show that V_obs(η) remains smooth and fully contained inside the SQM/decoherence nuisance envelope across N(η_c), with sensitivity sufficient to detect ε. This standard requires independent η calibration, a fixed baseline, pre-registered η_c and δ, locked decision statistics, adequate power, valid nuisance bounds, and successful artifact controls.
A positive result would be provisional. It would motivate replication and theoretical refinement, but it would not prove CBR final. A strong null would be more direct: it would exclude the tested accessibility-signature model at the specified ε scale. An inconclusive result would identify which part of the apparatus, calibration, baseline, or power analysis must be improved.
The value of the paper is therefore not dependent on obtaining a favorable result. Its value is that it defines a fair test. It converts CBR from a broad proposal about quantum outcome realization into a laboratory-facing protocol with measurable quantities, controlled alternatives, and a meaningful failure condition.
CBR becomes scientifically serious only where it becomes vulnerable. This protocol defines that vulnerability through an observable V_obs(η), an accessibility variable η, a standard baseline V_SQM(η), a predicted localized deviation L(η), a nuisance envelope Δ_nuisance(η), an effect-size threshold ε, a strong-null criterion, and artifact-first interpretation rules. That structure is the paper’s central contribution.
Appendices
Appendix A: Notation
V denotes interference visibility:
V = (I_max − I_min) / (I_max + I_min)
η denotes normalized accessible which-path mutual information:
η = I_acc(W;R) / H(W)
where W is the which-path variable, R is the accessible idler record, I_acc(W;R) is the accessible mutual information between W and R, and H(W) is the maximum path entropy.
η_c denotes the critical accessibility value.
δ denotes the transition-neighborhood width.
N(η_c) denotes the transition neighborhood:
N(η_c) = [η_c − δ, η_c + δ]
ε denotes the predicted minimum CBR deviation.
ε_min denotes the minimum detectable deviation.
V_SQM(η) denotes the standard quantum/decoherence baseline.
V_CBR(η) denotes the tested CBR visibility model:
V_CBR(η) = V_SQM(η) + L(η)
L(η) denotes the proposed CBR accessibility term:
L(η) = V_CBR(η) − V_SQM(η)
Δ_nuisance(η) denotes the systematic nuisance envelope.
σ_total(η) denotes total uncertainty.
V_obs(η) denotes observed visibility.
T denotes the full-scan statistic:
T = maxη |V_obs(η) − V_SQM(η)| / σ_total(η)
T_c denotes the transition-region statistic:
T_c = maxη∈N(η_c) |V_obs(η) − V_SQM(η)| / σ_total(η)
Appendix B: SQM Baseline Construction
The SQM/decoherence baseline V_SQM(η) is the fixed reference prediction against which the tested CBR accessibility term is evaluated.
The baseline may be constructed by one of three pre-registered methods:
A first-principles SQM/decoherence model using the prepared quantum state, interferometer transfer functions, distinguishability, decoherence parameters, detector response, loss channels, and coincidence conditioning.
A calibration-derived empirical model using control runs in which no CBR-type accessibility transition is predicted.
A hybrid model combining standard quantum structure with calibration parameters fixed before unblinding.
The baseline must not be adjusted after observing V_obs(η). A valid baseline must satisfy:
V_control(η) ∈ V_SQM(η) ± Δ_nuisance(η)
for all pre-registered control conditions.
If control data contain unexplained transition-like structure near η_c, baseline validation fails and the experiment is inconclusive.
Appendix C: Mutual-Information Definition of η
η is defined as:
η = I_acc(W;R) / H(W)
This makes η an operational measure of usable which-path record content.
η = 0 means:
I_acc(W;R) = 0
η = 1 means:
I_acc(W;R) = H(W)
Intermediate values satisfy:
0 < I_acc(W;R) < H(W)
η must be calibrated from idler-record data, not inferred from V_obs(η). If η is inferred from visibility, the protocol becomes circular and cannot test the CBR accessibility model.
Appendix D: η Calibration Protocol
The η calibration protocol proceeds in four stages.
First, establish η = 0 by demonstrating that no usable which-path record is recoverable above the noise floor.
Second, establish η = 1 by maximizing accessible which-path mutual information under the apparatus constraints.
Third, generate intermediate η values through controlled record-accessibility variation, such as tunable distinguishability, partial erasure, storage/retrieval control, detector gating, calibrated degradation, or delayed record availability.
Fourth, repeat η calibration before and after the visibility scan to test stability.
For each η setting, record η, η uncertainty, count rate, accidental coincidence rate, detector stability, phase stability, idler distinguishability, retrieval fidelity, and coincidence recoverability.
η uncertainty must be propagated into σ_total(η) and T_c.
Appendix E: Nuisance-Envelope Construction
Δ_nuisance(η) represents systematic uncertainty from known non-CBR sources.
It should include phase noise, detector inefficiency, dark counts, accidental coincidences, timing jitter, mode mismatch, spectral mismatch, polarization drift, source brightness drift, idler loss, imperfect erasure, alignment instability, post-selection bias, baseline-model uncertainty, and calibration uncertainty.
Δ_nuisance(η) must be constructed or rule-bounded before unblinding. If it is widened after observing V_obs(η), the result is inconclusive unless the widening rule was pre-registered.
A candidate CBR signature must satisfy:
|V_obs(η) − V_SQM(η)| > Δ_nuisance(η)
and:
|V_obs(η) − V_SQM(η)| ≥ ε
inside N(η_c).
Appendix F: Simulation Procedure and Pseudocode
The simulation tests whether the planned experiment can detect the predicted CBR accessibility term before real data are interpreted.
The simulation must include smooth-null, CBR-injected, and nuisance-dominated cases.
Stepwise procedure:
Define the η grid, with dense sampling inside N(η_c).
Fix η_c, δ, ε, ε_min, V_SQM(η), Δ_nuisance(η), and σ_total(η).
Generate the smooth-null model:
L(η) = 0
V_null(η) = V_SQM(η)
Generate the CBR-injected model:
V_CBR(η) = V_SQM(η) + L(η)
with:
|L(η)| ≥ ε
for at least one η inside N(η_c).
Generate nuisance-dominated cases where deviations arise from ordinary systematics rather than L(η).
Add statistical noise, η uncertainty, detector noise, phase drift, accidental coincidences, and baseline uncertainty.
Compute:
T = maxη |V_obs(η) − V_SQM(η)| / σ_total(η)
and:
T_c = maxη∈N(η_c) |V_obs(η) − V_SQM(η)| / σ_total(η)
Apply the pre-registered detection, exclusion, and inconclusive-result rules.
Estimate ε_min.
Determine whether ε ≥ ε_min.
If ε < ε_min, the experiment is underpowered for a strong-null claim.
Appendix G: Statistical Decision Rules
A candidate CBR-type signature requires all of the following:
The deviation occurs inside N(η_c).
The deviation exceeds ε.
The deviation exceeds Δ_nuisance(η).
The deviation exceeds σ_total(η).
The deviation improves the pre-registered model comparison.
The deviation survives artifact controls.
The deviation remains stable under η re-calibration.
A strong null requires:
V_obs(η) ∈ V_SQM(η) ± Δ_nuisance(η)
across N(η_c), while:
ε ≥ ε_min
and all validity gates pass.
If validity gates fail, the result is inconclusive.
Appendix H: Pre-Registration Template
Before data collection, fix:
η definition
η_c
δ
N(η_c)
ε
ε_min estimation method
V_SQM(η) construction method
Δ_nuisance(η) construction rule
σ_total(η) components
visibility extraction method
η calibration protocol
T and T_c
model-selection rule
detection threshold
exclusion threshold
control conditions
artifact-rejection rules
validity gates
failed-run criteria
unblinding sequence
version-controlled analysis code
The pre-registration must state:
The tested CBR accessibility model is disconfirmed if V_obs(η) remains smooth and fully contained inside V_SQM(η) ± Δ_nuisance(η) across N(η_c), with sensitivity sufficient to detect ε.
Appendix I: Blinded-Analysis Checklist
The blinded-analysis procedure must verify that visibility extraction, background subtraction, binning, fitting, η uncertainty propagation, nuisance-envelope application, and T_c calculation follow the locked protocol.
Required checks:
η labels are blinded or masked where feasible.
η_c is not selected post hoc.
L(η) is not fitted freely after inspection.
Excluded data satisfy pre-registered exclusion rules.
Any recalibration is timestamped and justified.
The unblinding sequence is documented.
All deviations from protocol are logged.
Code changes are version-controlled.
Failed runs are identified before CBR interpretation.
Appendix J: Rival-Explanation Rejection Criteria
A candidate CBR-type signature is not interpretable until ordinary explanations are bounded below the observed effect size.
Required artifact checks include ordinary decoherence modeling, idler-loss controls, detector-efficiency checks, phase-drift monitoring, mode-mismatch diagnostics, polarization-stability checks, post-selection robustness tests, accidental-coincidence correction, calibration-leakage prevention, timing-window controls, and source-stability checks.
The default interpretation of an unexpected deviation is artifact, incomplete baseline modeling, or uncontrolled systematic error until these alternatives are ruled out.
Appendix K: Mock Results and Classification Rules
A smooth null means V_obs(η) remains inside the SQM/decoherence envelope across N(η_c). If ε ≥ ε_min and all validity gates pass, this is disconfirming for the tested CBR model.
A weak anomaly means a deviation appears but fails one or more requirements. This is artifact-prioritized or inconclusive.
A localized η_c deviation means a deviation appears inside N(η_c), exceeds ε, exceeds nuisance bounds, improves the pre-registered model comparison, and survives controls. This is provisionally supportive, pending replication.
A deviation outside η_c is not supportive of the tested model.
A replication failure is not supportive and returns the burden to artifact analysis.
Appendix L: Replication Checklist
A replication attempt should use the same η definition, comparable η_c and δ settings, an independently constructed V_SQM(η), a pre-registered nuisance envelope, adequate power to detect ε, matching artifact controls, and a locked decision rule.
Replication should report whether the same localized deviation appears inside N(η_c), whether it exceeds ε, whether it survives controls, and whether it remains stable under η re-calibration.
A single unreplicated deviation remains provisional.
Appendix M: Relation to Prior Quantum Eraser Experiments
This protocol is related to delayed-choice quantum eraser experiments but differs in its target.
Standard quantum eraser experiments demonstrate the relationship between interference and which-path information under different measurement conditions. The present protocol tests whether operational record accessibility η produces a localized deviation from smooth SQM/decoherence behavior near η_c.
The paper does not claim that prior quantum eraser experiments are incorrect. It uses the quantum eraser architecture as a controlled platform for testing a narrower accessibility-signature hypothesis.
The distinguishing feature is the strong-null structure: if η is independently calibrated, V_SQM(η) is fixed, nuisance effects are bounded, and no localized L(η) appears despite sensitivity to ε, then the tested CBR accessibility model is disconfirmed.
Appendix N: Validity Gates
No result may be interpreted as supportive or disconfirming unless the validity gates pass.
The required gates are:
Baseline validation passes.
η calibration is independent of V_obs(η).
η calibration is stable before and after the visibility scan.
η uncertainty is propagated into σ_total(η).
V_SQM(η) is fixed before unblinding.
Δ_nuisance(η) is fixed or rule-bounded before unblinding.
ε and ε_min are fixed before interpretation.
Power analysis shows ε ≥ ε_min.
Counts meet pre-registered sufficiency thresholds.
Phase, timing, polarization, detector, and source stability remain within tolerance.
Loss-only, sham-erasure, idler-blocked, timing-window, phase-drift, detector-stability, and calibration-leakage controls pass.
η_c and δ are not changed after observing V_obs(η).
L(η) is not fitted freely after data inspection.
If any validity gate fails, the result is inconclusive. It cannot be used as evidence for CBR and cannot be used as a strong null against the tested model.
Appendix O: Audit Trail and Version Control
The experiment must maintain a timestamped audit trail.
The audit trail should record:
pre-registration version,
analysis-code version,
simulation-code version,
η calibration files,
baseline-construction files,
nuisance-envelope files,
visibility-extraction settings,
excluded data,
failed runs,
recalibrations,
apparatus changes,
threshold changes,
unblinding sequence,
control-run outcomes,
and deviations from the registered protocol.
Any change affecting η, η_c, δ, ε, ε_min, V_SQM(η), Δ_nuisance(η), σ_total(η), T, T_c, visibility extraction, or model selection after unblinding downgrades the result to exploratory unless the change was explicitly pre-registered.
The audit record is part of the scientific result. Without it, the experiment cannot claim strong-null or positive-support status.
Appendix P: Minimum Laboratory Reporting Standard
A laboratory report using this protocol must disclose enough apparatus detail for independent evaluation.
At minimum, report:
source type,
source brightness,
pair-production rate,
heralding efficiency,
spectral filtering,
polarization filtering,
detector type,
detector efficiency,
dark counts,
timing jitter,
coincidence-window width,
accidental coincidence rate,
phase-stability method,
measured phase drift,
mode-overlap diagnostics,
idler-record control method,
η calibration method,
η uncertainty at each setting,
number of η points,
η sampling density inside N(η_c),
counts per η setting,
number of repeated scans,
visibility extraction method,
baseline validation results,
nuisance-envelope construction,
power analysis,
control outcomes,
unblinding procedure,
and decision-rule outcome.
If these quantities are not reported, the experiment should be treated as incomplete for purposes of evaluating CBR.
Appendix Q: What Does Not Count as Evidence
The following do not count as evidence for a CBR-type accessibility signature:
an anomaly outside N(η_c),
a broad deviation across the η range,
a post-hoc fitted L(η),
a deviation smaller than ε,
a deviation inside Δ_nuisance(η),
a deviation explainable by ordinary decoherence,
a deviation reproduced by loss-only controls,
a deviation reproduced by sham-erasure controls,
a deviation reproduced by timing-window controls,
a deviation coincident with phase drift,
a deviation caused by detector instability,
a deviation dependent on post-selection choices,
a deviation obtained after changing η_c post hoc,
a deviation obtained after widening Δ_nuisance(η) post hoc,
or a deviation that fails replication.
A CBR-type accessibility signature is only a candidate if it is localized inside N(η_c), exceeds ε, exceeds nuisance and uncertainty bounds, improves the pre-registered model comparison, survives artifact controls, and remains stable under η re-calibration.
This rule preserves the protocol’s central discipline: unusual data are not automatically meaningful data.